


M4E Research #14: February 2025

Personalized Education with Generative AI and Digital Twins: VR, RAG, and Zero-Shot Sentiment Analysis for Industry 4.0 Workforce Development

Abstract: The Fourth Industrial Revolution (4IR) technologies, such as cloud computing, machine learning, and AI, have improved productivity but introduced challenges in workforce training and reskilling. This is critical given existing workforce shortages, especially in marginalized communities like Underrepresented Minorities (URM), who often lack access to quality education. Addressing these challenges, this research presents gAI-PT4I4, a Generative AI-based Personalized Tutor for Industrial 4.0, designed to personalize 4IR experiential learning. gAI-PT4I4 employs sentiment analysis to assess student comprehension, leveraging generative AI and finite automaton to tailor learning experiences. The framework integrates low-fidelity Digital Twins for VR-based training, featuring an Interactive Tutor - a generative AI assistant providing real-time guidance via audio and text. It uses zero-shot sentiment analysis with LLMs and prompt engineering, achieving 86\% accuracy in classifying student-teacher interactions as positive or negative. Additionally, retrieval-augmented generation (RAG) enables personalized learning content grounded in domain-specific knowledge. To adapt training dynamically, finite automaton structures exercises into states of increasing difficulty, requiring 80\% task-performance accuracy for progression. Experimental evaluation with 22 volunteers showed improved accuracy exceeding 80\%, reducing training time. Finally, this paper introduces a Multi-Fidelity Digital Twin model, aligning Digital Twin complexity with Bloom's Taxonomy and Kirkpatrick's model, providing a scalable educational framework.
Authors: Yu-Zheng Lin, Karan Petal, Ahmed H Alhamadah, Sujan Ghimire, Matthew William Redondo, David Rafael Vidal Corona, Jesus Pacheco, Soheil Salehi, Pratik Satam
Link: https://arxiv.org/abs/2502.14080
Augmented Knowledge Graph Querying leveraging LLMs

Abstract: Adopting Knowledge Graphs (KGs) as a structured, semantic-oriented, data representation model has significantly improved data integration, reasoning, and querying capabilities across different domains. This is especially true in modern scenarios such as Industry 5.0, in which the integration of data produced by humans, smart devices, and production processes plays a crucial role. However, the management, retrieval, and visualization of data from a KG using formal query languages can be difficult for non-expert users due to their technical complexity, thus limiting their usage inside industrial environments. For this reason, we introduce SparqLLM, a framework that utilizes a Retrieval-Augmented Generation (RAG) solution, to enhance the querying of Knowledge Graphs (KGs). SparqLLM executes the Extract, Transform, and Load (ETL) pipeline to construct KGs from raw data. It also features a natural language interface powered by Large Language Models (LLMs) to enable automatic SPARQL query generation. By integrating template-based methods as retrieved-context for the LLM, SparqLLM enhances query reliability and reduces semantic errors, ensuring more accurate and efficient KG interactions. Moreover, to improve usability, the system incorporates a dynamic visualization dashboard that adapts to the structure of the retrieved data, presenting the query results in an intuitive format. Rigorous experimental evaluations demonstrate that SparqLLM achieves high query accuracy, improved robustness, and user-friendly interaction with KGs, establishing it as a scalable solution to access semantic data.
Authors: Marco Arazzi, Davide Ligari, Serena Nicolazzo, Antonino Nocera
Link: https://arxiv.org/abs/2502.01298
Demonstrating a Control Framework for Physical Human-Robot Interaction Toward Industrial Applications
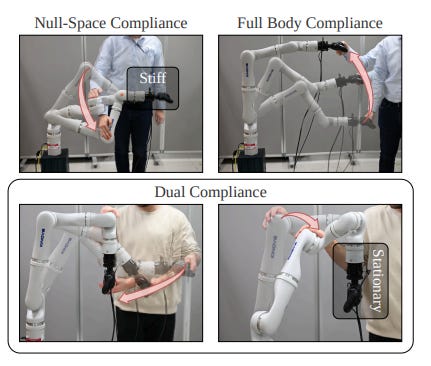
Abstract: Human-Robot Interaction (pHRI) is critical for implementing Industry 5.0 which focuses on human-centric approaches. However, few studies explore the practical alignment of pHRI to industrial grade performance. This paper introduces a versatile control framework designed to bridge this gap by incorporating the torque-based control modes: compliance control, null-space compliance, dual compliance, all in static and dynamic scenarios. Thanks to our second-order Quadratic Programming (QP) formulation, strict kinematic and collision constraints are integrated into the system as safety features, and a weighted hierarchy guarantees singularity-robust task tracking performance. The framework is implemented on a Kinova Gen3 collaborative robot (cobot) equipped with a Bota force/torque sensor. A DualShock 4 game controller is attached at the robot's end-effector to demonstrate the framework's capabilities. This setup enables seamless dynamic switching between the modes, and real-time adjustment of parameters, such as transitioning between position and torque control or selecting a more robust custom-developed low-level torque controller over the default this http URL on the open-source robotic control software mc_rtc, to ensure reproducibility for both research and industrial deployment, this framework demonstrates industrial-grade performance and repeatability, showcasing its potential as a robust pHRI control system for industrial environments.
Authors: Bastien Muraccioli (CNRS-AIST JRL), Celerier Mathieu (CNRS-AIST JRL), Benallegue Mehdi (CNRS-AIST JRL), Venture Gentiane (CNRS-AIST JRL, UTokyo)